线段树¶
线段树和树状数组一样,他储存的是原数组中某个区间的信息,但是他比树状数组更加全能,用树状数组能实现的基本上都能用线段树来实现,反之则不一定成立,但是树状数组的常数比线段树小。
只要是某个大区间的信息能够由两个更小区间的信息合并而来,那么就可以用线段树来进行处理。
基础知识¶
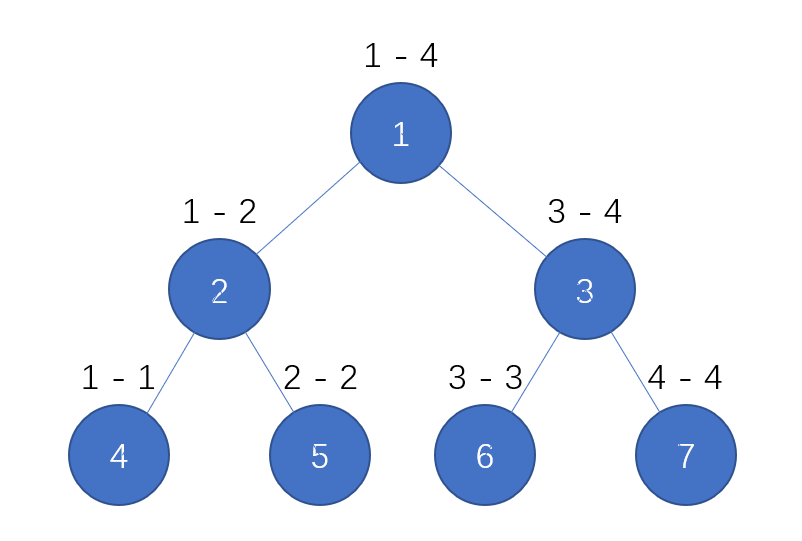
观察上图,这就是一颗很普通的线段树,其中1号节点储存的是原数组中1-4的信息,2号存储1-2的信息,4号储存1-1的信息。如果我们想知道1-2的信息,那么我们可以由1-1 , 2-2的信息合并而来,同理,如果我们想知道1-3的信息,那么我们可以用1-2 , 3-3的信息合并起来。而且我们在预处理的时候就能够将1-2的信息给处理出来,这样就可以直接使用处理好的信息。
如果我们想修改某个区间的信息,例如2-2的信息,那么我们只需要修改5,2,1三个节点的数据即可。
查询的时间复杂度为O(log n) ,修改的复杂度为O(log n)。
详细知识¶
对于此题,每个节点需要储存的信息为,节点左边界,右边界,区间和
const int maxn = 1e5+5;
struct node{
int l, r;
long long sum;
}tree[maxn * 4]; // 线段树一般开4倍空间
long long a[maxn];//原数组
开点建树¶
利用数组来模拟树,以p*2为左节点,p*2+1为右节点,每个节点处理一半的信息。注意当当前区间左节点与右节点相同时,代表已经到达了叶子节点,此时的信息可以从数组中直接得到。由于递归,当左右两颗树都建好了,那么左右两颗树的信息也都处理好了,此时就能够由两颗树直接处理。时间复杂度为O(nlogn) 。详细看代码。
/*
p: 当前节点编号
l: 当前节点左边界
r: 当前节点右边界
*/
void build(int p, int l, int r){
tree[p].l = l;
tree[p].r = r;
if(l == r){//到了最下方的节点,此时节点直接对应数组
tree[p].sum = a[l]; // l-l的和就是a[l],因为只有一个节点,其他情况自由发挥
return;
}
int mid = (l + r) / 2; //将当前区间分割成两个小区间
build(p*2, l, mid);
build(p*2+1, mid + 1, r);
tree[p].sum = tree[p*2].sum + tree[p*2+1].sum; // 大区间的和为两个小区间的和之和c
}
查询¶
题目中的操作2,如果我们想知道 [l,r] 的和,那么我们直接去线段树中去寻找即可,注意区间的划分,详细看代码。
/*
p: 当前节点
l: 目标区间左端点
r: 目标区间右端点
*/
long long query(int p, int l, int r){
if(tree[p].l >= l && tree[p].r <= r) return tree[p].sum; // 当前节点所存储的区间在目标区间之内,那么我们直接用当前节点的信息即可
int mid = (tree[p].l + tree[p].r) / 2; // 注意是将当前区间分割成两半
long long sum = 0;
if(mid >= l) sum += query(p*2, l, r); // 如果有部分目标区间在当前区间所划分的左区间之内,那么去左区间瞅瞅
if(mid+1 <= r) sum += query(p*2+1, l, r); // 如果有部分目标区间在当前区间所划分的右区间之内,那么去右区间瞅瞅
return sum;
}
至此,操作2已经完成,即线段树的查询已经结束。接下来是更新的内容了。
更新¶
先来常规更新
常规更新¶
与查询类似,如果要更新某个区间的值,那么我们只需要不断的去寻找这个区间,把最下面的节点更改掉,然后更新一下节点的和即可。注意此时的复杂度为O(n log n)。
/*
p: 当前节点
l: 目标区间左端点
r: 目标区间右端点
k: 增加的数
*/
int update(int p, int l, int r, long long k){
if(tree[p].l == tree[p].r){ // 到达叶子节点
tree[p].sum += k; // 区间增加分解到点增加
return;
}
int mid = (tree[p].l + tree[p].r) / 2;
if(mid >= l) update(p*2, l, r, k); // 如果有部分目标区间在当前区间所划分的左区间之内,那么去左区间改改
if(mid + 1 <= r) update(p*2+1, l, r, k); // 如果有部分目标区间在当前区间所划分的右区间之内,那么去右区间改改。
tree[p].sum = tree[p*2].sum + tree[p*2+1].sum; // 更新当前区间新的和
}
可以发现,这样看起来虽然很高级,但是也有点傻。线段树他是储存的区间信息,那么我们可不可以先把区间处理了,小区间先放一放,等后面要用小区间的信息了再去处理,这样是不是会快一些。此时,我们引入 懒标记 。
懒标记¶
懒标记是对区间是否应该修改进行标记。是否应该修改,应该怎么修改,应该修改多少等等等等,这些都能用懒标记来进行懒处理。
懒标记主要体现在一个懒字,正如上文所说,我们可以先不处理小区间的信息,先处理大区间的信息,把小区间需要处理标记一下,等下次要用这个小区间了,再来处理这个小区间。说起来有点抽象,下面用代码来解释。
long long mark[maxn * 4]; // 懒标记是对线段树节点进行懒标记
void pushdown(int p){
if(mark[p] != 0){ // 如果存在懒标记
int l = tree[p].l, r = tree[p].r;
int mid = (l + r) / 2;
mark[p*2] += mark[p]; // 懒标记往下传
mark[p*2+1] += mark[p];
tree[p*2].sum += (mid - l + 1) * mark[p]; // 区间增加相同的数,即区间和增加 数字*数量
tree[p*2+1].sum += (r - (mid+1) + 1) * mark[p];
mark[p] = 0; // 清楚当前节点的懒标记
}
}
int update(int p, int l, int r, long long k){
if(tree[p].l >= l && tree[p].r <= r){
tree[p].sum += (tree[p].r - tree[p].l + 1) * k;
mark[p] += k;
return;
}
pushdown(p);// 把当前节点的懒标记传下去
int mid = (tree[p].l + tree[p].r) / 2;
if(mid >= l) update(p*2, l, r, k);
if(mid + 1 <= r) update(p*2+1, l, r, k);
tree[p].sum = tree[p*2].sum + tree[p*2+1].sum;
}
long long query(int p, int l, int r){
if(tree[p].l >= l && tree[p].r <= r) return tree[p].sum;
pushdown(p); // 注意懒标记
int mid = (tree[p].l + tree[p].r) / 2;
long long sum = 0;
if(mid >= l) sum += query(p*2, l, r);
if(mid+1 <= r) sum += query(p*2+1, l, r);
return sum;
}
注意建树,修改,查询时,都是从最大的节点,即1号节点开始走。
例题完整代码¶
下面给出题目完整代码
#include<iostream>
using namespace std;
const int maxn = 1e5+5;
struct node{
int l, r;
long long sum;
}tree[maxn * 4]; // 线段树一般开4倍空间
long long a[maxn], mark[maxn * 4];
void build(int p, int l, int r){
tree[p].l = l;
tree[p].r = r;
if(l == r){//到了最下方的节点,此时节点直接对应数组
tree[p].sum = a[l]; // l-l的和就是a[l],因为只有一个节点,其他情况自由发挥
return;
}
int mid = (l + r) / 2; //将当前区间分割成两个小区间
build(p*2, l, mid);
build(p*2+1, mid + 1, r);
tree[p].sum = tree[p*2].sum + tree[p*2+1].sum; // 大区间的和为两个小区间的和之和c
}
void pushdown(int p){
if(mark[p] != 0){ // 如果存在懒标记
int l = tree[p].l, r = tree[p].r;
int mid = (l + r) / 2;
mark[p*2] += mark[p]; // 懒标记往下传
mark[p*2+1] += mark[p];
tree[p*2].sum += (mid - l + 1) * mark[p]; // 区间增加相同的数,即区间和增加 数字*数量
tree[p*2+1].sum += (r - (mid+1) + 1) * mark[p];
mark[p] = 0; // 清楚当前节点的懒标记
}
}
void update(int p, int l, int r, long long k){
if(tree[p].l >= l && tree[p].r <= r){
tree[p].sum += (tree[p].r - tree[p].l + 1) * k;
mark[p] += k;
return;
}
pushdown(p);// 把当前节点的懒标记传下去
int mid = (tree[p].l + tree[p].r) / 2;
if(mid >= l) update(p*2, l, r, k);
if(mid + 1 <= r) update(p*2+1, l, r, k);
tree[p].sum = tree[p*2].sum + tree[p*2+1].sum;
}
long long query(int p, int l, int r){
if(tree[p].l >= l && tree[p].r <= r) return tree[p].sum;
pushdown(p); // 注意懒标记
int mid = (tree[p].l + tree[p].r) / 2;
long long sum = 0;
if(mid >= l) sum += query(p*2, l, r);
if(mid+1 <= r) sum += query(p*2+1, l, r);
return sum;
}
int main(void){
int n, m;
cin>>n>>m;
for(int i = 1;i <= n;i++) cin>>a[i];
build(1, 1, n);
for(int i = 0;i < m;i++){
int ch;
cin>>ch;
if(ch == 2){
int l, r;
cin>>l>>r;
cout<<query(1, l, r)<<endl;
}else{
int l, r, k;
cin>>l>>r>>k;
update(1, l, r, k);
}
}
return 0;
}
上文为crotes编写,下文为currywoe编写
线段树进阶技巧¶
约 3545 个字 735 行代码 预计阅读时间 21 分钟
下文需要读者熟悉最朴素的单点修改区间查询,维护区间信息的线段树作为基础,例程如下:
typedef long long ll;
const int N=1e5+3;
ll a[N];//a为初始序列,有n个元素,1-indexed
struct SegmentTree
{
struct node
{
ll sum;
}st[N<<2];
void build(int id,int l,int r)
{
if (l ==r)
{
st[id]={a[l]};
return;
}
int mid=(l + r)/2;
build(id << 1,l,mid);
build(id<<1|1,mid + 1,r);
st[id].sum=st[id<<1].sum+st[id<<1|1].sum;
}
void update(int id,int segl,int segr,int pos,ll val)
{
if (segl==segr)
{
st[id].sum+=val;
return;
}
int mid=(segl + segr)/2;
if (pos<=mid)
update(id << 1,segl,mid,pos,val);
else
update(id<<1|1,mid+1,segr,pos,val);
st[id].sum=st[id<<1].sum+st[id<<1|1].sum;
}
ll query(int id,int segl,int segr,int L,int R)
{
if (L <=segl && segr <=R)
return st[id].sum;
int mid=(segl + segr)/2;
ll res=0;
if (L <=mid)
res+=query(id << 1,segl,mid,L,R);
if (R > mid)
res+=query(id<<1|1,mid+1,segr,L,R);
return res;
}
}st;
st.build(1,1,n);
st.update(1,1,n,pos,val);
st.query(1,1,n,l,r);
一些零碎细节¶
array of struct 比 struct of array 略快一点
实时计算点的l,r,比存下来去找,快
求mid用右移比除2,快。因为编译器不会把有符号除2的幂优化为右移
segl是负数时只能用右移,因为-3/2=-1,偏右
当值域特别大的时候(segl+segr)会溢出,正确写法是(segl>>1)+(segr>>1)+(segl&segr&1)
懒标记(lazy tag)¶
当试图修改 [l,r] 区间的元素,如果采用最朴素版本的修改,每次操作的复杂度是 O((r-l+1)\log n),当操作次数很多,时间复杂度就爆炸
线段树上节点sum表示的意义,是一段区间的信息,而修改也是一种区间的信息。那么可以把修改信息放在一个节点上,表示这个区间都要受到这种修改。
朴素版每次修改后,每个节点的sum真的表示一段区间的信息。因为朴素版修改了所有受到影响的节点
懒标记只修改了部分收到影响的节点,因此称为懒标记。因此sum的意义也变了,表示一段时间之前,这段区间的信息
实现¶
每个节点加上变量lazy tag表示懒标记,修改或查询的递归之前都下推懒标记(pushDown),来保证左右儿子区间的信息是最新的
修改:如果一个节点的区间都要被修改,那就把修改信息放在这里,不再搜索到叶子节点;否则继续向下递归
查询:和朴素版类似,多了下推懒标记
在建树和修改,都需要合并左右儿子信息,为了复用这段代码,有pushup函数
struct SegmentTree
{
struct node
{
ll sum,lz;
}st[N<<2];
void pushup(int id)
{
st[id].sum=(st[id<<1].sum+st[id<<1|1].sum);
}
void pushdown(int id,int lsonlen,int rsonlen)
{
if (!st[id].lz)
return;
st[id<<1].lz+=st[id].lz;
st[id<<1|1].lz+=st[id].lz;
st[id<<1].sum+=st[id].lz*lsonlen;
st[id<<1|1].sum+=st[id].lz*rsonlen;
st[id].lz=0;
}
void build(int id,int l,int r)
{
if (l ==r)
{
st[id]={a[l],0};
return;
}
int mid=(l + r)/2;
build(id << 1,l,mid);
build(id<<1|1,mid + 1,r);
pushup(id);
}
void update(int id,int segl,int segr,int l,int r,ll val)
{
if (l <=segl && segr <=r)
{
st[id].sum+=val*(segr-segl+1);
st[id].lz+=val;
return;
}
int mid=(segl + segr)/2;
pushdown(id,mid-segl+1,segr-mid);
if (l <=mid)
update(id << 1,segl,mid,l,r,val);
if (r > mid)
update(id<<1|1,mid+1,segr,l,r,val);
pushup(id);
}
ll query(int id,int segl,int segr,int l,int r)
{
if (l <=segl && segr <=r)
return st[id].sum;
int mid=(segl + segr)/2;
pushdown(id,mid-segl+1,segr-mid);
ll res=0;
if (l <=mid)
res+=query(id << 1,segl,mid,l,r);
if (r > mid)
res+=query(id<<1|1,mid+1,segr,l,r);
return res;
}
}st;
st.build(1,1,n);
st.update(1,1,n,l,r,val);
st.query(1,1,n,l,r);
注意¶
如果混用单点修改和区间修改,单点修改时也需要下推标记
标记永久化¶
思想类似懒标记,修改信息放在一个节点上,表示这个区间都要受到这种修改。
不同于懒标记:不下推标记;修改时直接加上影响;查询时带上标记
实现¶
struct SegmentTree
{
struct node
{
ll sum,lz;
}st[N<<2];
void build(int id,int l,int r)
{
if (l ==r)
{
st[id]={a[l],0};
return;
}
int mid=(l + r)/2;
build(id << 1,l,mid);
build(id<<1|1,mid + 1,r);
st[id].sum=(st[id<<1].sum+st[id<<1|1].sum);
}
void update(int id,int segl,int segr,int l,int r,ll val)
{
if (l <=segl && segr <=r)
{
st[id].sum+=val*(segr-segl+1);
st[id].lz+=val;
return;
}
int mid=(segl + segr)/2;
if (l <=mid)
update(id << 1,segl,mid,l,r,val);
if (r > mid)
update(id<<1|1,mid+1,segr,l,r,val);
st[id].sum+=val*(min(segr,r)-max(segl,l)+1);
}
ll query(int id,int segl,int segr,int l,int r,ll lz)
{
if (l <=segl && segr <=r)
return st[id].sum+lz*(segr-segl+1);
int mid=(segl + segr)/2;
ll res=0;
if (l <=mid)
res+=query(id << 1,segl,mid,l,r,lz+st[id].lz);
if (r > mid)
res+=query(id<<1|1,mid+1,segr,l,r,lz+st[id].lz);
return res;
}
}st;
st.build(1,1,n);
st.update(1,1,n,l,r,val);
st.query(1,1,n,l,r,0ll);
懒标记和标记永久化的对比¶
平衡树这样点的相对位置会改变的,只能用懒标记,保证碰到的节点,其信息是最新的。
可持久化这样一个点有多个父亲的,如果用懒标记,下传标记如果不开新节点会影响前面的树,开新节点容易卡空间,只能用标记永久化。
其他情况用两个都行。
静态开点¶
定义:所有要表示的区间,其节点下标已经确定
朴素版就是一种静态开点,根节点为1,假设当前节点id,左右儿子分别是 id*2 和 id*2+1。这种方式用到的节点数小于2n,用到的最大下标小于4n。
另一种静态开点,可以使用到的最大下标小于2n,但是常数略差,猜测是访存不够连续,cache经常miss,根据洛谷模板题“线段树3”的测试,大约慢了36%。做法就是当前点的左右儿子是 mid*2 和 mid*2+1
第二种静态开点的证明见帖子第二页
动态开点¶
定义:所有要表示的区间,实时分配其节点下标
每个节点新增两个变量l,r,表示其左右儿子的节点下标
不使用0作为实际存在的节点的下标,且信息(sum)为空。若某节点的下标为0,表示尚未分配下标
修改时搜索到尚未分配下标的节点,直接分配一个新的下标
查询时搜索到尚未分配下标的节点,说明没有信息要合并,直接返回
初始化要把所有节点都设置为尚未分配下标
namespace SegmentTree
{
struct node
{
int l,r;
ll sum;
}st[N];
int tot;
void update(int &id,int segl,int segr,int pos, ll val)
{
if(!id)
id=++tot;
if (segl==segr)
{
st[id].sum+=val;
return;
}
int mid = (segl + segr)/2;
if (pos <= mid)
update(st[id].l,segl,mid,pos,val);
else
update(st[id].r,mid+1,segr,pos,val);
st[id].sum=st[st[id].l].sum+st[st[id].r].sum;
}
ll query(int id,int segl,int segr,int L, int R)
{
if(!id)
return 0;
if (L <= segl && segr <= R)
return st[id].sum;
int mid = (segl + segr)/2;
ll res = 0;
if (L <= mid)
res+=query(st[id].l, segl,mid,L, R);
if (R > mid)
res+=query(st[id].r,mid+1,segr, L, R);
return res;
}
void init()
{
for(;tot;--tot)
st[tot]={0,0,0ll};
}
};
st::init();
st::update(1,1,n,pos,x);
st::query(1,1,n,l,r);
加内存池的动态开点¶
如果认为一个节点暂时无用,回收该节点的下标,在申请下标时优先使用回收的下标
对于信息是区间和的情况,当节点信息为0时,认为其暂时无用
部分毒瘤题需要此技巧,省空间
namespace segmentTreeWithMemoryPool
{
struct node
{
int l,r;
ll sum;
}st[N];
int tot;
vector<int> memoryPool;
void newNode(int &id)
{
if(memoryPool.empty())
id=++tot;
else
{
id=memoryPool.back();
memoryPool.pop_back();
}
}
void delNode(int &id)
{
memoryPool.push_back(id);
id=0;
}
void update(int &id, int l, int r,int pos,ll val)
{
if(!id)
newNode(id);
st[id].sum+=val;
if(l==r)
return;
int mid = (l+r)/2;
if (pos <= mid)
update(st[id].l,l,mid,pos,val);
else
update(st[id].r,mid+1,r,pos,val);
if(st[id].sum==0)
delNode(id);
}
ll query(int id,int segl,int segr,int l, int r)
{
if(!id)
return 0;
if (l <= segl && segr <= r)
return st[id].sum;
int mid = (segl + segr)/2;
ll res=0;
if (l <= mid)
res+=query(st[id].l,segl,mid,l,r);
if (r > mid)
res+=query(st[id].r,mid+1,segr,l,r);
return res;
}
};
静态开点和动态开点的对比¶
静态开点:占用空间大,时间快
动态开点:占用空间小,时间慢。
静态开点4n就行,动态开点需要手算一下空间,能开多大开多大,cf915E离MLE就差一点才能AC。
如果需要很多颗线段树,只能用动态开点,记录下每棵树根分配到的下标
要表示的区间很多而有用的区间少,只能用动态开点。
权值线段树¶
朴素版是维护区间信息的,权值线段树是维护值域内数的个数
[2,3,1,2,2,3] 这个原序列,转化为值域序列就是 [1,3,2] ,表示1的个数有1个,2的个数有3个,3的个数有2个
权值线段树的操作和朴素版几乎一致,只是维护信息不同。
通常题目的值域会很大,可以通过离散化或者动态开点解决
01字典树和强制值域为 [0,2^k] 的动态开点权值线段树,获得的树形结构是一模一样的,但是由于写法不同,01字典树常数小一点,根据luoguP1908 逆序对,约快 8%,提交1,提交2,如果01字典树要处理负值域,可以偏移,但是感觉有点屎了
下面给出动态开点,单点修改,权值线段树的例程
struct SegmentTree
{
struct node
{
int l,r,sum;
}st[N];
int tot;
void update(int &id, int l, int r,int val)
{
if(!id)
id=++tot;
++st[id].sum;
if(l==r)
return;
int mid = (l+r)/2;
if (val <= mid)
update(st[id].l,l,mid,val);
else
update(st[id].r,mid+1,r,val);
}
int query(int id,int segl,int segr,int l, int r)
{
if (l <= segl && segr <= r)
return st[id].sum;
int mid = (segl + segr)/2,res=0;
if (l <= mid)
res+=query(st[id].l,segl,mid,l,r);
if (r > mid)
res+=query(st[id].r,mid+1,segr,l,r);
return res;
}
void init()
{
for(;tot;--tot)
st[tot]={0,0,0};
}
}st;
st.init();
st.update(1,MinVal,MaxVal,val);
st.query(1,MinVal,MaxVal,l,r);
线段树上二分¶
注意到线段树是一颗二叉树,如果信息满足二分性,那么线段树天然适合二分
这里以求全局第k小为例,如果不使用排序,可以用权值线段树+线段树上二分解决
至于为什么不使用排序,因为这个技巧是区间第k小的前置知识,直接学区间第k小,难度跨度有点大
而且不止这种信息可以用线段树上二分,例题
设当前节点表示值域 [l,r],想求这个值域的第k小
设该节点左儿子表示值域 [l,mid] ,左儿子的值域内的数有x个,若x小于k,那说明答案在右儿子的值域内,否则在左儿子的值域内
每次递归把答案所在值域缩小一半,完全符合二分
struct SegmentTree
{
struct node
{
int l,r,sum;//这里的l,r表示左右儿子分配到的下标
}st[N<<2];
int tot;
//初始化之后把原序列所有值扔到线段树上
void update(int &id, int l, int r,int val)
{
if(!id)
id=++tot;
++st[id].sum;
if(l==r)
return;
int mid = (l+r)/2;
if (val <= mid)
update(st[id].l,l,mid,val);
else
update(st[id].r,mid+1,r,val);
}
int query(int id,int segl,int segr,int k)
{
if (segl==segr)
return segl;
int mid = (segl + segr)/2;
if (st[st[id].l].sum>=k)
return query(st[id].l,segl,mid,k);
return query(st[id].r,mid+1,segr,k);
}
void init()
{
for(;tot;--tot)
st[tot]={0,0,0};
}
}st;
st.init();
for(int i=1;i<=n;++i)
st.update(1,MinVal,MaxVal,a[i]);
st.query(1,MinVal,MaxVal,k);
可持久化(persistent)¶
笔者感觉这个翻译不够好,但是大家都是这么叫的
定义:初始有一个信息为空的东西,不断对其修改,会产生多个版本,保存每个历史版本就是可持久化
比如photoshop上画画,可以撤销上一次画的东西,也就是回到上一个版本
应用到线段树上,最朴素的方法是,每次修改都新建一颗树,继承上一棵树的信息,同时把这一次修改的信息添加上
但是很明显时空复杂度都不可接受。注意到每次修改只有部分点受到影响,因此可以共用没受到影响的点
struct persistentSegmentTree
{
int tot,n,rtnum;//rtnum表示版本数量
int rt[N];//每棵树根分配到的下标
struct node
{
int l,r;
ll sum;
}st[N<<5];
void build(int &id,int l,int r)
{
id=++tot;
if(l==r)
{
st[id].sum=a[l];
return;
}
int mid=(l+r)/2;
build(st[id].l,l,mid);
build(st[id].r,mid+1,r);
st[id].sum=st[st[id].l].sum+st[st[id].r].sum;
}
//单点修改
void update(int &id,int pre,int l,int r,int pos,ll val)
{
id=++tot;
st[id]=st[pre];//继承上一棵树表示相同区间的对应节点的信息
st[id].sum+=val;
if(l==r)
return;
int mid=(l+r)/2;
if(pos<=mid)
update(st[id].l,st[id].l,l,mid,pos,val);
else
update(st[id].r,st[id].r,mid+1,r,pos,val);
}
ll query(int id,int segl,int segr,int l,int r)
{
if(!id)
return 0;
if(l<=segl && segr<=r)
return st[id].sum;
int mid=(segl+segr)/2;
ll res=0;
if(l<=mid)
res+=query(st[id].l,segl,mid,l,r);
if(r>mid)
res+=query(st[id].r,mid+1,segr,l,r);
return res;
}
void update(int root,int pos,ll val)//指定版本的单点修改
{
update(rt[++rtnum],rt[root],1,n,pos,val);
}
ll query(int root,int l,int r)//指定版本的区间查询
{
return query(rt[root],1,n,l,r);
}
void init(int n)
{
tot=rtnum=0;
this->n=n;
build(rt[0],1,n);
}
}pst;
pst.init(n);
pst.update(rt,pos,val);
pst.query(rt,l,r);
注意¶
求节点u为根的子树内节点v的信息合并,且uv深度差要在 [l,r] 范围内,可以按照深度为版本号,dfs序作为下标,插入可持久化线段树。画图理解就是矩形和三角形面积取交得到梯形
主席树(可持久化权值线段树+线段树上二分)¶
区间第k小,可以转化为两个版本相减之后,第k小。版本相减类似于前缀和吧(
struct persistentWeightSegmentTree
{
int tot,q;
int rt[N];
struct node
{
int l,r,sum;
}st[N<<5];
void init(int n)//原数组a(1-indexed),离散化数组C
{
tot=0;
memcpy(C+1,a+1,sizeof(a[0])*(n));
sort(C+1,C+n+1);
q=unique(C+1,C+n+1)-C-1;
for(int i=1;i<=n;++i)
modify(rt[i],rt[i-1],1,q,lower_bound(C+1,C+q+1,a[i])-C);
}
void modify(int &id,int pre,int l,int r,int pos)
{
id=++tot;
st[id]=st[pre];
++st[id].sum;
if(l==r)
return;
int mid=(l+r)/2;
if(pos<=mid)
modify(st[id].l,st[id].l,l,mid,pos);
else
modify(st[id].r,st[id].r,mid+1,r,pos);
}
int query(int u,int v,int l,int r,int k)//查询区间[u,v]的第k小值的下标
{
if(l==r)
return l;
int mid=(l+r)/2,x=st[st[v].l].sum-st[st[u].l].sum;
if(x>=k)
return query(st[u].l,st[v].l,l,mid,k);
return query(st[u].r,st[v].r,mid+1,r,k-x);
}
int ask(int l,int r,int k)
{
return C[query(rt[l-1],rt[r],1,q,k)];
}
}wt;
wt.init(n);
wt.ask(l,r,k);
扫描线¶
离线算法,枚举一维,修改查询另一维
以求平面矩形面积的并为例
使用一条垂直于X轴的直线,从左到右来扫描这个图形
明显,只有在碰到矩形的左边界或者右边界的时候,这个线段所扫描到的情况才会改变
所以把所有矩形的入边,出边按X值排序。然后根据X值从小到大去处理,就可以用线段树来维护y方向上哪些点被矩形覆盖了
扫描线扫描到的情况变化时,对图像切一刀,那么原图像就变成多个互不重叠矩形,相邻两个边差值表示宽,y方向上被覆盖长度表示高,高宽相乘得矩形面积
例程是 hdu1542
#include<bits/stdc++.h>
using namespace std;
const int N=2e2+3;
const int M=1e5+3;
struct Line
{
double x,y1,y2;
int flag;
bool operator<(const Line& o)const
{
return x<o.x;
}
}a[N];
double discreY[N];
namespace segmentTree
{
struct node
{
int lz;
double sum;
} st[M];
void pushup(int id,int segl,int segr)
{
if(st[id].lz)
st[id].sum=discreY[segr]-discreY[segl];
else
st[id].sum=st[id<<1].sum+st[id<<1|1].sum;
}
void build(int id,int l,int r)
{
st[id]={0,0};
if(r-l<=1)
return;
int mid=(l+r)/2;
build(id*2,l,mid);
build(id*2+1,mid,r);
}
void upd(int id,int segl,int segr,int l,int r,int val)
{
if(l<=segl && segr<=r)
{
st[id].lz+=val;
pushup(id,segl,segr);
return;
}
int mid=(segl+segr)/2;
if(l<mid)
upd(id<<1,segl,mid,l,r,val);
if(r>mid)
upd(id<<1|1,mid,segr,l,r,val);
pushup(id,segl,segr);
}
};
int main()
{
ios::sync_with_stdio(false);
cin.tie(nullptr);
cout.tie(nullptr);
int n;
for(int kase=1;;++kase)
{
cin>>n;
if(!n)
break;
for(int i=1;i<=n;++i)
{
double x1,y1,x2,y2;
cin>>x1>>y1>>x2>>y2;
a[i]={x1,y1,y2,1};
a[i+n]={x2,y1,y2,-1};
discreY[i]=y1;
discreY[i+n]=y2;
}
sort(a+1,a+n*2+1);
sort(discreY+1,discreY+n*2+1);
int q=unique(discreY+1,discreY+n*2+1)-discreY-1;
double ans=0;
segmentTree::build(1,1,q);
for(int i=1;i<=n*2;++i)
{
ans+=segmentTree::st[1].sum*(double)(a[i].x-a[i-1].x);
int y1=lower_bound(discreY+1,discreY+q+1,a[i].y1)-discreY;
int y2=lower_bound(discreY+1,discreY+q+1,a[i].y2)-discreY;
segmentTree::upd(1,1,q,y1,y2,a[i].flag);
}
cout<<"Test case #"<<kase<<"\nTotal explored area: "<<fixed<<setprecision(2)<<ans<<"\n\n";
}
return 0;
}
势能线段树¶
懒标记可以节省开销的前提是:节点的区间信息可以根据懒标记来更新;懒标记之间可以快速相互合并
但是有些区间修改操作不能依靠懒标记完成,比如区间开根号,区间位运算,因为这些运算都是依赖于叶子节点的值
以区间开根为例,1再开根还是1,所以修改没有意义,就是操作已经“退化”了
因此可以暴力开根每个叶子节点。当区间最大值都是1,说明这个区间不用递归进去修改,反正值不会变
而一个数不断开根,变成1需要的次数非常少。所以总操作次数可以保证不会太大
而势能线段树就是每个节点维护一个势能标记,就好像你一开始位于高空,每次修改会让你的高度下降,当你落到地面时,再对你修改就已经没有意义了。就是这个操作对你而言已经"退化"了。
对于区间开根,区间最大值就是势能标记。对于区间取模,区间最大值就是势能标记。对于区间变成其因子数,区间最大值就是势能标记
简而言之,势能线段树就是暴力剪枝
以下笔者还没学
李超线段树¶
线段树合并¶
新建式
int merge(int u, int v, int l, int r) {
if (!u || !v)
return u + v; // 如果有一个为空,就返回不为空的;如果都为空就返回空
int c = ++cnt;
if (l == r)
{
T[c].v = T[u].v + T[v].v;
return c;
}
int mid = l + r >> 1;
T[c].ls = merge(T[u].ls, T[v].ls, l, mid);
T[c].rs = merge(T[u].rs, T[v].rs, mid + 1, r);
pushup(c);
return c;
}
int merge(int u, int v, int l, int r) {
if (!u || !v)
return u + v;
if (l == r)
{
T[u].v += T[v].v;
return u;
}
int mid = l + r >> 1;
T[u].ls = merge(T[u].ls, T[v].ls, l, mid);
T[u].rs = merge(T[u].rs, T[v].rs, mid + 1, r);
pushup(u);
return u;
}